
Jaunā NASA Marsa izpētes rovera "Perseverance" lidojošais kompanjons – drons "Ingenuity" – veicis nu jau devīto lidojumu. Misija, par kuras veiksmīgu iznākumu būtu uzskatīts arī kaut tikai viens sekmīgs un 10 sekunžu ilgs lidojums, turpina pārsteigt, un drons "Ingenuity" uzstādījis kārtējos rekordus, taču ne bez sarežģījumiem. Inženieriem bija krietni jāpapūlas.
Pats lidojums notika pirmdien, 5. jūlijā, taču gatavošanās tam ilga nedēļu. Jāatgādina, ka lielā attāluma dēļ signāls līdz Marsam no Zemes ceļo ilgu laiku, tāpēc nekāda ierīču vadīšana reālā laikā nav iespējama. Visas instrukcijas dronam jānodod pirms lidojuma un jācer, ka tās ir nekļūdīgas un tikpat nekļūdīgi tiks izpildītas.
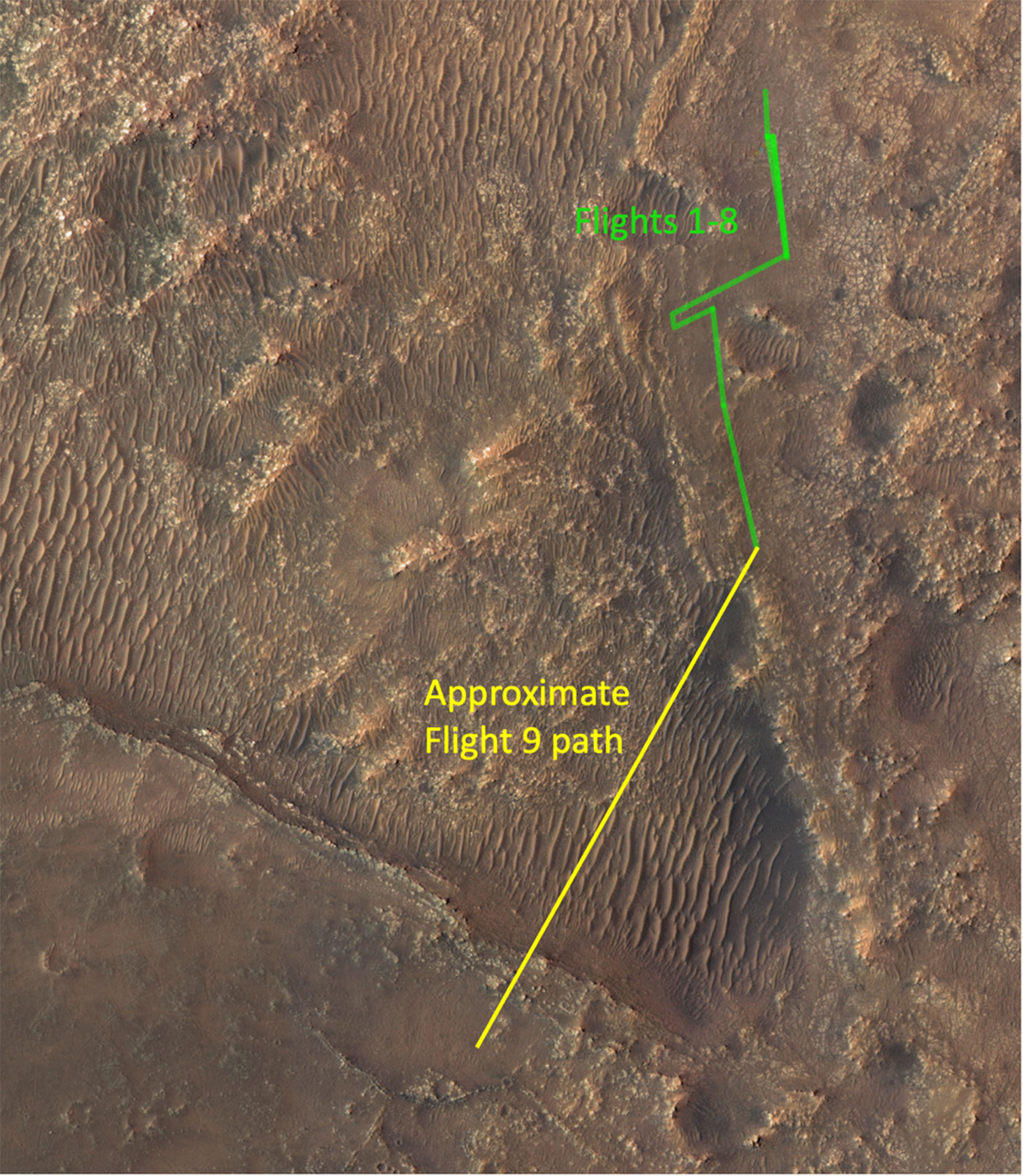
Saņemot atbildi no "Ingenuity", inženieri varēja uzgavilēt – drons savā devītajā lidojumā bija veicis 625 metrus, līdz šim lielāko attālumu. Iepriekšējais rekords tika pārspēts teju četrkārtīgi. Tāpat tika pārspēti arī lidojuma laika un kruīza ātruma rekordi. Tiem, kas dronus mēdz lidināt uz Zemes, varētu šķist – kas gan tur īpašs? Taču, kā jau minēts, nekādas iespējas labot kļūdas lidojuma laikā nav, arī izvairīšanās no šķēršļiem ir pilnībā drona algoritma pārziņā. Nemaz nerunājot par to, ka uz Marsa ārkārtīgi retinātajā atmosfērā jebkāds rotoru lidaparātu lidojums ir lielisks sasniegums pats par sevi.
Tā kā "Ingenuity" galvenais uzdevums bija vispār pacelties gaisā, par tālākiem lidojumiem tika domāts mazāk. Drona navigācijas sistēma tika izstrādāta ar šo domu prātā – pacelties un veikt nelielu pārlidojumu (veiksmes gadījumā vairākus) virs līdzenām virsmām. Šoreiz lidojums notika pāri sarežģītākam reljefam, tostarp virs krātera, un "Ingenuity" navigācijas sistēmām tas bija izaicinājums un spēju pārbaude.
Kad cilvēki veras attēlos, kas uzņemti ar "Ingenuity" pret zemi vērsto navigācijas kameru, mēs uzreiz atpazīstam, kas tie par objektiem – vai lielāks akmens, plaisa, vai krāteris, varbūt tikai ēna. Savukārt drona navigācijas algoritmam nav "izpratnes" par šādām niansēm. Viss, ko algoritms "redz", ir punkti, kas noteiktā laika nogrieznī pārvietojas, un mēģina šīs kustības interpretēt. Lai nejauktu dronam galvu (jo sākotnēji bija iecerēti lidojumi tikai līdzenās vietās), NASA inženieri šo parametru iestrādāja algoritmā – visas šīs nelielās variācijas (akmeņi, plaisas) būtībā aizvien atrodas uz caurmērā līdzenas virsmas. Tādējādi algoritmam faktiski tika pateikts – neņem vērā šīs nelielās variācijas uz zemes pašas par sevi, bet interpretē šo objektu kustību tikai kā drona pārvietošanās rezultātu.
Sarežģījumi rodas, kolīdz virsma vairs nav līdzena, bet jau ar būtiskām variācijām reljefā, piemēram, kad runa ir par krātera nogāzi. Šādā stāvā nogāzē drona navigācijas kameras redzes laukā dažādi punkti dažādās kadra vietās pārvietojas ar atšķirīgu ātrumu, bet algoritms tos aizvien mēģina interpretēt kā punktu pārvietošanos tikai un vienīgi helikoptera kustības rezultātā un nevis tāpēc, ka objekti navigācijas kameras redzes lauka lejas daļā atrodas daudz zemāk nekā objekti augšdaļā, dronam lidojot ārā no krātera. Drona navigācijas algoritmā pieņēmums, ka visa virsma apakšā ir plakana, līdzena, ir "iecepts" pašos pamatos un nav maināms. Rezultātā, lidojot virs sarežģīta reljefa, var notikt nevēlamas nobīdes no maršruta un drons var aizlidot citā virzienā. Tas ir arī drona drošības jautājums, jo NASA rūpīgi izvēlas nosēšanās vietu tā, lai tuvākajā apkārtnē nebūtu lielu akmeņu vai citu objektu, kas varētu nozīmēt, piemēram, drona apgāšanos, ja tas piezemējas uz nelīdzenas virsmas. Aizlidojot nepareizā virzienā, šāds risks stipri pieaug.
Tā kā pašu veidu, kā navigācijas algoritms interpretē datu plūsmu, NASA vairs mainīt nevar, inženieri mēģina paredzēt iespējamās kļūmes, kas var rasties šajā procesā, dronam lidojot virs krāteriem vai citiem izteikta reljefa apgabaliem, un iestrādāt pretpasākumus. Piemēram, šajā gadījumā, dronam sasniedzot krāteri, nosūtītajās instrukcijās bija iestrādāts rīkojums būtiski samazināt lidojuma ātrumu, lai mazinātu nesakritības. Pie lielāka ātruma tās būtu izteiktākas un attiecīgi arī iespējamā kļūme virziena noteikšanā – lielāka. Tāpat šoreiz arī nolūkotais nosēšanās laukums bija prāvāks – iepriekš tie bija pat tikai 10 reiz 10 metri. Šoreiz, rēķinoties ar nobīdēm no maršruta, tika piemeklēta piezemēšanās vieta, kur līdzena virsma ir 50 metru rādiusā. Drons nosēdās 47 metru attālumā no šī laukuma nosacītā centra.
Nu NASA gaida lidojuma laikā uzņemtos attēlus, kas tostarp no augšas parādīs dažas no vietām, kuras plānots apmeklēt un izpētīt ar "Perseverance" roveru. Rovera grafiks gan ir pamatīgi "piepakots", lielām nobīdēm no tā nav vaļas, tāpēc ne visas vietas būs iespējams apciemot arī ar roveru. Tādā gadījumā "Ingenuity" uzņemtie aerofoto būs vienīgā iespēja tuvāk papētīt šādus veidojumus, piemēram, par "Pilot Pinnacle" dēvētos atsegumus, kas varētu nest liecības par kādreiz uz Marsa bijušo šķidro ūdeni.





